

SST-DN3-PCI-2
仲鑫达自动化只做一件事为领您的机组自动化装置保驾护航!
ABB:工业机器人备件DSQC系列、Bailey INFI 90等。
Siemens(西门子)伺服控制系统:Siemens MOORE, Siemens
✪Simatic C1,
6SN1118,6ES7416,6FC5103,6SN1123,6RB2026,6SC6100,6SN1145,6
SN6111,6SC6101 Siemens S5 这些系列
Motorola(摩托罗拉):MVME 162、MVME 167、MVME1772、
MVME177等系列。
XYCOM:I/O 、VME板和处理器等。
GE FANUC(GE发那科):模块、卡件、驱动器等各类备件。
Yaskawa(安川):伺服控制器、伺服马达、伺服驱动器。
Bosch Rexroth(博世力士乐)伺服控制系统:Indramat Motor
MAC,DCK04.3,Bosch Versorgungs.I/O模块,PLC控制器,驱动模块
等。
Woodward(伍德沃德):SPC阀位控制器、PEAK150数字控制器。
INDUSTRIAL ROBOT SPARE PARTS
ABB ROBOTICS KUKA ROBOTICS YASKAWA ROBOTICS KAWASAKI
ROBOTICS FANUC ROBOTICS NACHI OTHER
因继电器控制系统是以“并行”方式工作的,而且其触点的通断需要一定的动作时间。所以当该电路起动后,时间继电器KT延时时间到时,KT是否能继续保持通电状态,需要同时考虑“并行”的两个动作过程:KT的常闭延时触点断开,KA1失电,KA1常开触点断开;KT的常开延时触点闭合,KA2得电,KA2常开触点闭合。这两个过程作用的结果,来决定KT的状态。同时,触点动作时间的存在,使得电路出现时序竞争。因此该电路不能可靠工作。如果加入虚框中的回路,并如图1把KA2的常开触点换成KA3的常开触点(见图1中括号)。结果是KT动作后,KT自身失电,就不会继续保持通电状态。
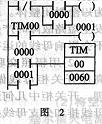
同样是这个电路,我们用PC来实现,梯形图如图2 所示。
 BENTLY 3500/15
BENTLY 3500/15
























